Paso 1: Paso 1 - la electrónica
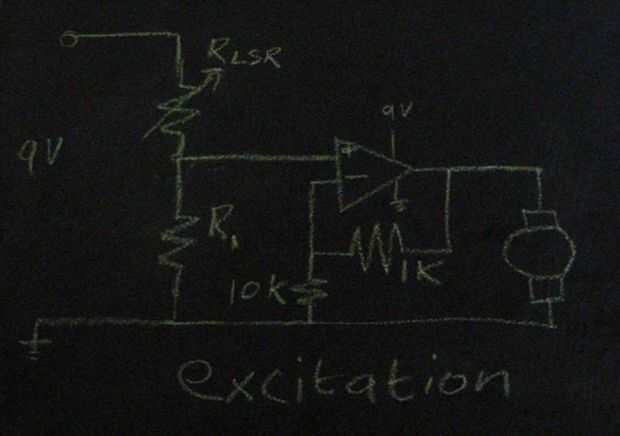
como se puede ver es solo un divisor del voltaje en un amplificador operacional no inversor. para el resistor R1, puede utilizar una segadora como lo hice, o puede utilizar una resistencia que coincide con la resistencia de su ligera resistencia sensible (LSR) cuando se está completamente saturado con la luz. como aumentan los niveles de luz que rodean el LSR, es la resistencia disminuirá. En la configuración actual, el voltaje medido a través de la luz resistencia sensible será 9v*R1/(Rlsr+R1). Como tal, cuando no hay luz se envía a la LSR es la resistencia será muy alta en relación a R1 para que el voltaje enviado al motor será casi cero. En contraste, si el sensor de luz está totalmente saturado el voltaje enviado al motor será la mitad de la tensión de alimentación (4.5v). Esto explica por qué la figura de arriba se denomina excitación - más luz se ve, el más rápido el motor girará.
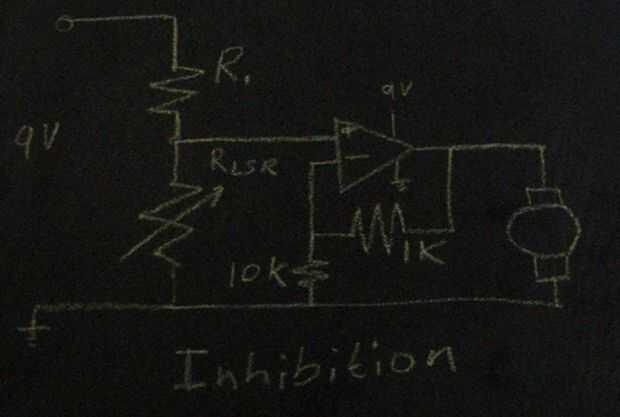
Para cambiar el motor de modo de la excitación y en el modo de inhibición, todo lo que tienes que hacer es cambiar R1 y el LSR como se muestra en la figura segunda. Esto hará que los motores de giro rápido en la oscuridad, pero lento a medida que aumenta la luz.
Sería bueno si podríamos conectar nuestros motores directamente a nuestros divisores de voltaje, pero los motores necesitan demasiado corriente para que funcione. Para asegurarse de que nuestros motores tienen un montón de corriente para el nom en, pondremos algunos op-amps carnosos entre ellos y los divisores de tensión. La lm272 es una gran opción para este tipo de aplicación. Puede poner hasta 1 amperio de corriente, y no necesita una fuente de voltaje negativo. Además de las conexiones que se muestra en la figura anterior, usted también tendrá que conecten el op-amp para alimentación y tierra. los valores de resistencia se muestra en la figura anterior establecen la ganancia relacionadas con nuestro voltaje de entrada a la tensión de salida a aproximadamente 1.1 (1 + 1k / 10k).
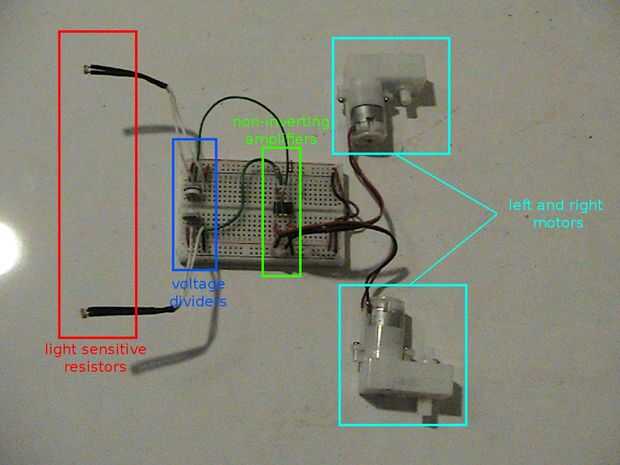
Una vez hayas completado el circuito, tu robot debe ser un poco algo protoboard en la tercera figura.






 utilizando un Arduino")






")