Paso 1: Comenzar con el tablero de conductor + Arduino
Este tablero se puede controlar de muchas maneras. Aquí, me centraré sólo en usarlo con Arduino.
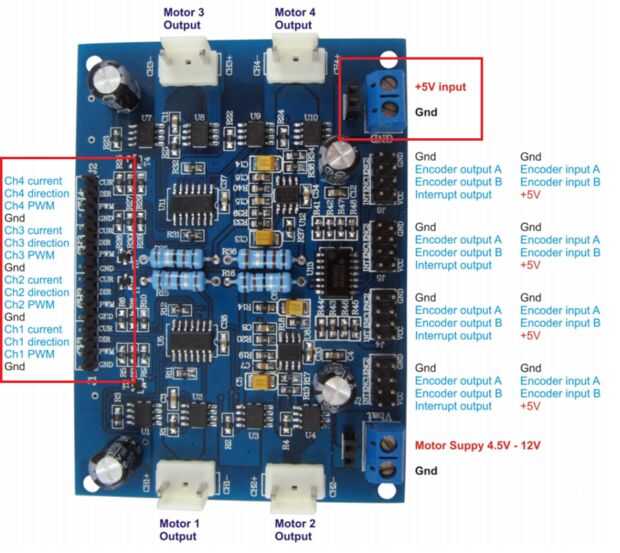
Pernos que están rodeados por el rectángulo rojo se conectarán a la placa Arduino.
En la parte superior, se encuentra los pines VCC y GND . Conecte el VCC 5V pin en su arduino y el pin GND con el pin GND en su arduino también.
A la izquierda, hay 4 pines de entrada de canal (uno por cada motor). Cada canal tiene 4 pines (GND - PWM - dirección - actual).
Pin de tierra debe conectarse a su arduino GND.
PWM pin se utiliza para controlar la velocidad del motor, debe ser conectado a un pin digital que soporta la salida PWM; para arduino uno (pines 3, 5, 6, 9, 10, 11).
Perno de Dirección se utiliza para determinar la dirección del motor, por ejemplo (cuando este pin es alta, el motor gira en una dirección específica cuando es baja, el motor gira en sentido opuesto). Este pin debe ser conectado a cualquier pin digital en la placa arduino.
En la parte inferior, se encuentra los terminales de entrada de potencia de los motores ellos mismos (MAX 12V, 4A).



")









")