Paso 4: Construir el circuito: teoría
-x 12 3906 transistores PNP de uso General (x25 de 3$)
-x 1 resistencia de 2kohm (centavos)
-x 1 TLC5940 (3$)
-x 1 protoboard (10$)
-x 1 Arduino Uno (15$)
-22g de alambre (3$)
Para este proyecto, yo a dedicar una placa entera y Arduino Uno. Aunque tiendo a preferir no para usar un Arduino hecha de antemano Junta para la construcción final, ni me gusta mantener el diseño final en protoboard - para mantener este proyecto simple y accesible para la gran mayoría de la gente - seguí esta ruta. Si hay suficiente interés, considero diseño e impresión de PCB para este proyecto para evitar el uso de la protoboard y crear un independiente discreta Arduino.
Tipo de LED :
El LED que había elegido, son cátodo común. Como ya comentamos anteriormente, esto implica que comparten un negativo común. Existe cierta confusión en el mundo del LED cuando se trata de lógica digital, que tipo de LED (común cátodo o ánodo +) dependiendo de los niveles lógicos y hardware que está utilizando. Me explico en términos el TLC5940 que vamos a usar.
El TLC5940 es un controlador PWM de 16 canales de Texas Instruments. Puede ser utilizado para generar 16 señales de pulso modulado ancho diferentes. En el mundo del LED, esto es una forma común y eficiente para atenuar LEDs. En lugar tradicionalmente bajar el voltaje o la corriente para atenuar señal el LED con un PWM - aplicamos pulsos muy rápidos de voltaje en los LEDs. Cambiando el ancho (o el tiempo) de los impulsos, efectivamente podemos convertir los LED de encendido y apagado más rápido que el ojo puede ver. Aumentando el ancho de pulso aumenta el tiempo de apagado - creación de un regulador de luminosidad. Disminuyendo el ancho de pulso disminuye el tiempo de apagado, así encender el LED durante períodos más largos y la creación de un nivel de luz más brillante. Estas señales PWM pueden utilizarse también a motor servos para mover a un ángulo específico de rotación, no obstante es para un Instructable totalmente independiente.
Hay 16 canales que una señal de PWM en el TLC5940. Uso de la biblioteca asociada, podemos directamente dirección cada pin y etiquetarlos con los designadores de referencia 0 a 15. La pregunta entra en juego, al observar los canales de salida. No se aplican a nivel de la lógica de un alto. Funcionan con un nivel de lógica TTL de baja, lo que significa que la señal PWM es bajo 2vdc. Esto es contrario de lo que necesitamos para cátodo común LED.
La salida en lo que llamamos en términos digitales, un alto nivel de imagen (o + 5vdc). La señal PWM enviada bajo, hasta bajo 2vdc. Turno encender nuestro LED, tenemos que el pin negativo común de tierra y 5vdc se aplican a cada pin del positivo de los LEDs. Poniendo simplemente la salida del pin + TLC5940 canales directamente a cada uno, los diodos no funcionará correctamente porque necesitan una alta + 5vdc de thly voltaje positivo al ánodo (+) y un menor potencial: por lo menos 2vdc inferior al cátodo (negativo) del LED. Esto se llama polarización. Necesitamos avanzar sesgo los diodos a, y del TLC no salida alta para lograr nuestras condiciones sesgadas hacia adelantados: significado de los LEDs no se enciende de las señales PWM.
Porque hay un enfrentamiento entre la salida de nivel lógico bajo de los canales del TLC5940 y el nivel de lógica alto requerido por los pernos positivos de LEDs. Para evitar este problema, utilizar transistores PNP 3906. Conectando a la base del transistor a la salida del canal PWM, el transistor se espera un nivel lógico bajo. Cuando lo recibió, efectivamente saturarán el transistor, encendiéndolo. El transistor, en esta aplicación, funciona exactamente igual que un interruptor: encenderse sólo cuando se transmite una señal PWM de lógica TTL de baja del TLC5940 a la base del transistor. Cuando se recibe un alto nivel de lo TLC, el transistor se abre como un interruptor y evita que la corriente de fluir hacia los LEDs, apagándolas.
Ahora podemos conectar el colector del transistor a una fuente de 5vdc separado que el Arduino y conectar el emisor directamente a los pernos positivos de los LEDs. Usar un transistor para cada color: rojo, verde y azul. Para que cada LED tenga 3 transistores, que controlando cada color: convertir la baja lógica del TLC, en un + 5 VDC señal PWM que encenderá los LEDs.
MAGIA.
Esta misma lógica puede aplicarse a cualquier situación. Si usted necesita para "invertir"--o invertir--un nivel de lógica, podemos utilizar dispositivos como NPN, los transistores PNP, inversores u otros dispositivos digitales como puertas y y o puertas, que tienen niveles lógicos y convertirlos en una señal de que podemos realmente. Si tienes ánodo común, puede colocar el positivo común de los LEDs directamente a una fuente de 5vdc y tierra cada perno coloreado de la negativa a los canales de PWM de TLCs. Esto funcionará suficientemente. Si usted es como yo y tiene cátodo común LED, tiene muchas opciones para invertir esta lógica para adaptarse a su tipo de carga.
Esta es la ruta que elegí, debido a la extremadamente bajo costo de los transistores PNP 3906 decentemente rápido cambiar la velocidad (rapidez puede encienda) y facilidad de uso.
Hay un bien escrito Web explicar plenamente el funcionamiento del TLC5940, sin embargo sólo utilizaremos sus funciones básicas.
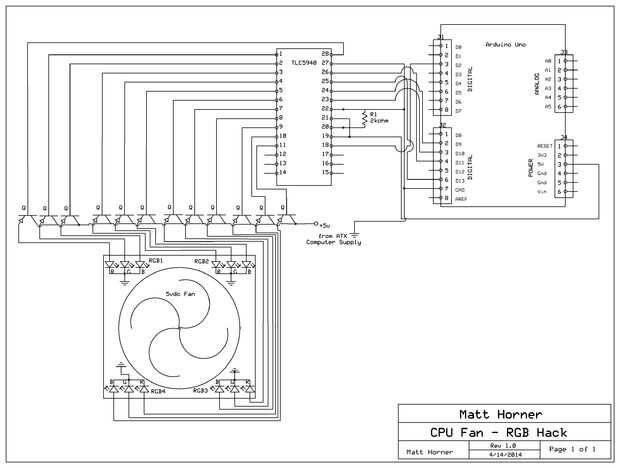
Aunque el esquema puede parecer complicado, la teoría es simple. Cada canal de salida PWM de la TLC5940 irá a la base de un transistor PNP. El colector de este transistor es atado alto, el + 5vdc salida de fuente de alimentación ATX de ordenador. El emisor de cada transistor es atado a un plomo solo del ánodo (+) de un LED. Repita este proceso para cada uno de los tres conductores del LED: uno para el rojo, uno verde y otro azul. Cada LED tiene tres transistores, controlados por tres canales PWM de la 5940. Esta misma lógica se aplica a todos los cuatro LEDs del ventilador. Cátodos de los LEDs (-) se ata bajo el suelo del equipo fuente de alimentación ATX.
En la siguiente sección se iniciará mostrando la construcción del circuito.












")
