Paso 11: Hacer ajustes
Hemos añadido 2 topes de chasis más para sostener nuestra vex controlador vertical ya que la batería no estaba conectada cuando nivela al robot.
Puede que necesite ajustar el código del robot así. Si va hacia atrás de la reversa RPM para-127. Si uno va a la otra dirección, cambiar el pwm a la misma que va hacia adelante.
Nuestro diseño inicial: 5 / 22
Lugar un tren de engranaje compuesto con la conducción de engranaje del engranaje de 60T conectado por barra de eje a una velocidad de 12T conectado a un equipo de 60T conectado por barra de eje a una velocidad T 12 que es el engranaje conducido. Esto nos da un cociente del engranaje de 1 a 25 aumentar velocidad 25 veces.
Cambios generales:
5/22 también agregar remolque de peso y quitar las ruedas regulares así podemos llevar el peso y las ruedas más grandes deben darnos mayor distancia en menos tiempo.
5/27 problema montaje nuestros engranajes y descubrió que nuestro esfuerzo de torsión disminuye 25 veces para que desmontado el robot y miró otros diseños
6/1 hemos cambiado nuestro diseño 1 a 1.6 y cambiado el chasis a la corriente
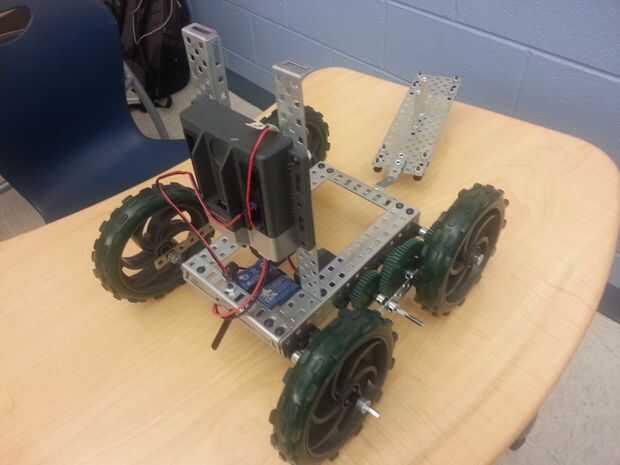
6/10 añadido 2 topes de chasis para fijar EDR VEX controlador vertical y motores
Diseño final: La demostró en este instructable.













