Paso 4: Calibración del acelerómetro
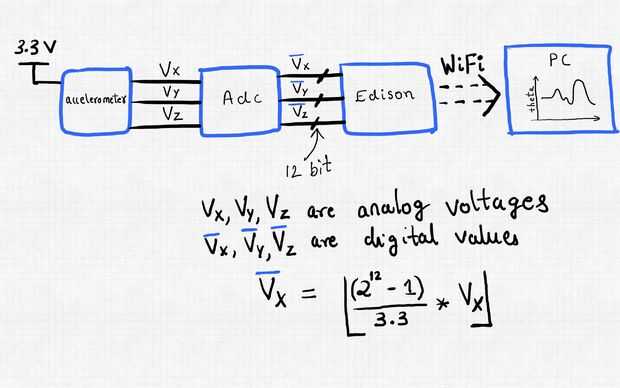
MRAA es una biblioteca fresca que proporciona API para acceder a IO en Edison y otras plataformas. Realmente ayuda a simplificar el código que escriba por lejos detalles del nivel bajo de abstracción. Consulte el código de python adjunto "accelerometer_calibrate_v1.py" para ver cómo utilizar MRAA para calibrar el acelerómetro. Cuando se ejecuta, imprime el promedio de 3 puntos de lecturas de voltaje del acelerómetro.
Cada eje del acelerómetro debe ser calibrado por separado. Voy a describir el procedimiento de calibración para el eje x. Puede seguir el mismo procedimiento para los ejes Y y Z.
- Debe tener el acelerómetro ya conectado a la placa de arduino de Edison como se describió anteriormente. Abra la masilla y a Edison sobre WiFi.
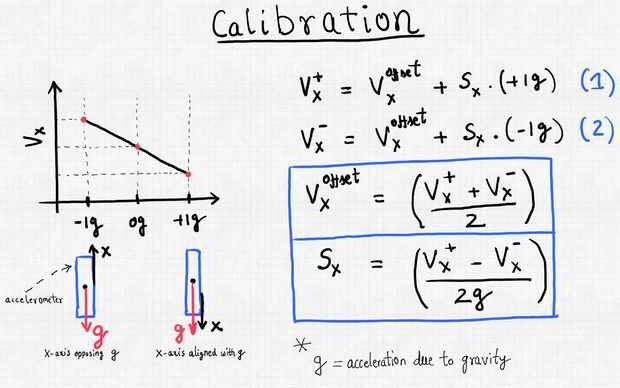
- Oriente el eje x del acelerómetro de manera que apunta verticalmente hacia abajo en el suelo y perpendicular al plano de tierra. En esta posición, eje x está alineada con la dirección de la gravedad de la tierra. Acuñó el tablero entre dos cajas en una mesa de modo que la junta vertical. Ejecutar el "accelerometer_calibrate_v1.py" y anotar la tensión. Se trata de Vx +
Orientar el eje x del acelerómetro para que ello apunte hacia arriba verticalmente y perpendicular al plano de tierra. En esta posición, el eje x se opone a la dirección de la gravedad de la tierra. Ejecutar el código de calibración y anotar la tensión. Se trata de Vx-
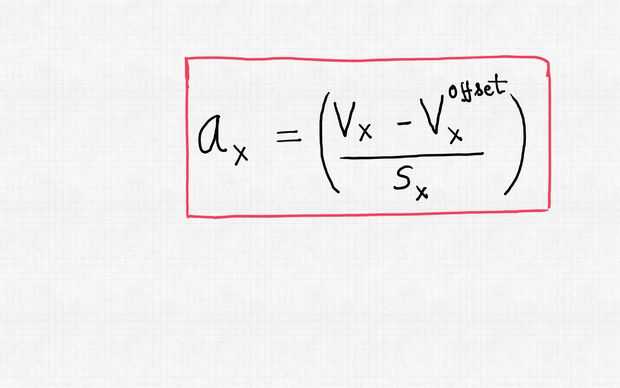
- Utilice las ecuaciones resaltadas en la figura 3 para obtener voltaje de offset y sensibilidad para el eje x. Enchufe el offset y la sensibilidad en la ecuación en la figura 4 para obtener la aceleración en g.
Referencias:









")


")
