Paso 1: prototipos


Una configuración común para un dispositivo de visualización sonido en muchas demostraciones de la ciencia consiste en estirar el globo sobre un cilindro y pegar un espejo en el centro del globo estirado. Presión cambios debido a sonido provocaría el globo estirado y por lo tanto el espejo a vibrar. Brillado en el espejo de la luz del láser es proyectada sobre una superficie, la visualización de la vibración acústica
Puesto que esta configuración parece ser un método probado de hacer exactamente lo que queríamos, hemos considerado un buen punto para nuestro prototipo (Foto 1). Lo que observamos fue que el efecto es bueno, pero hay algunos fallos con este método. En primer lugar, debido a la rigidez y el tamaño del globo estirado, ruidoso (problemático en un concierto) y sonido de baja frecuencia es necesario que producirá un patrón notable. En segundo lugar, el patrón proyectado parece ser predominantemente rectas.
Volver a la mesa de dibujo. Para abordar la primera cuestión, se decidió utilizar un transductor de audio (Foto 2) para conducir un pequeño voladizo con un espejo adjunto en su lugar. Nuestro camino correr (Video 1), vemos que hay solamente una gama muy pequeña de la frecuencia donde el patrón es notable. El ruido generado también era bastante ruidoso.
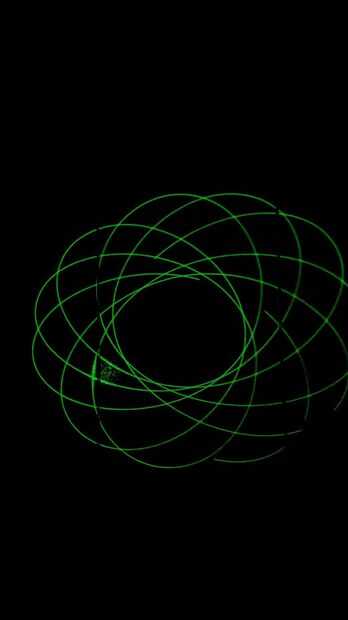
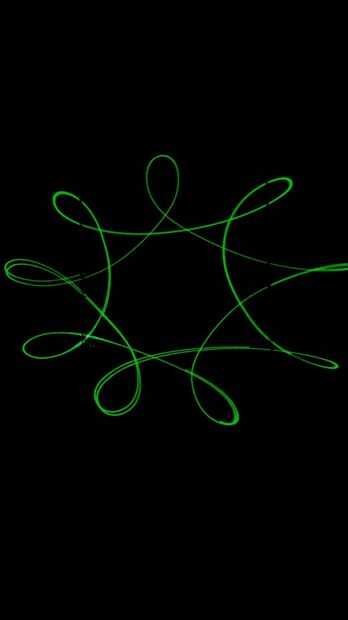
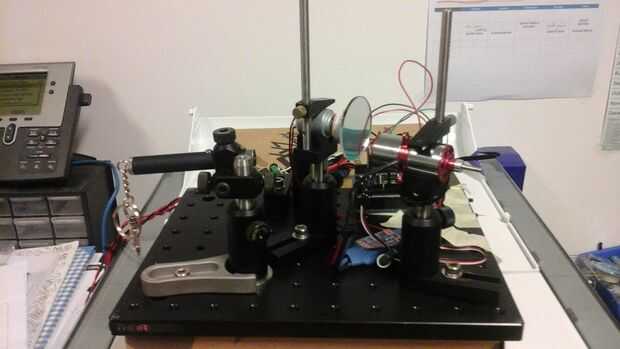
Necesitamos una manera de modular el ángulo de un espejo sin generar mucho ruido. Después de alguna lluvia de ideas pensamos en la idea de un espirógrafo. Un espirógrafo contiene dos espejos de spinning, titulados en un ligero ángulo. La primera reflexión crea un patrón de anillo, entonces el segundo espejo superponer un patrón espiral. Un prototipo (Foto 3), estallaron dos cheapo powered usb ventiladores y había instalado un resistencias variables en serie en las líneas de suministro de cada ventilador, nos permite ajustar su velocidad de rotación. El efecto puede verse en la foto 4 y 5.
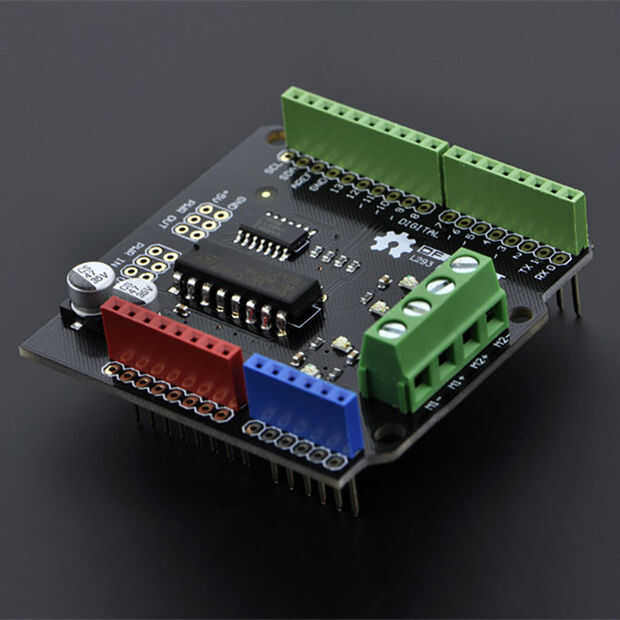
Junto al control electrónicamente la velocidad de rotación de cada motor, se utilizó un escudo motor Arduino compatible con dos canales. Escribimos un pequeño bosquejo que asigna los valores de ADC de los pernos análogos a los comandos de pwm al escudo del motor. Encontramos que el cepillado motores pequeños realmente no responden suficientemente rápido a la señal de entrada. Desde allí es no cerrado control de rpm, el motor de revoluciones varía mucho cuando hay alguna carga transitoria en él.
Así decidimos probar algunos motores brushless rc avión en su lugar. Al menos para los motores sin escobillas, la señal de servo rc es algo proporcional a la velocidad de rotación del motor. Sustituimos uno de motor cepillado con uno sin cepillo (foto 6) y la señal de audio a la señal de servo rc. El efecto puede ser visto aquí (Video 2). El lento cambio en el patrón es debido al motor del cepillo un poco calado de la vibración del motor sin escobillas. Ahora ya estamos en el camino correcto.

")











