Paso 2: Diseño y fabricación
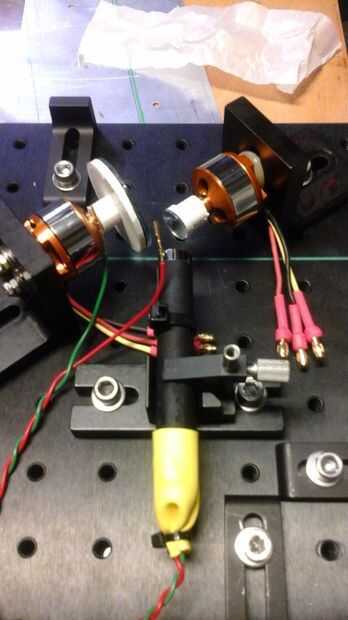

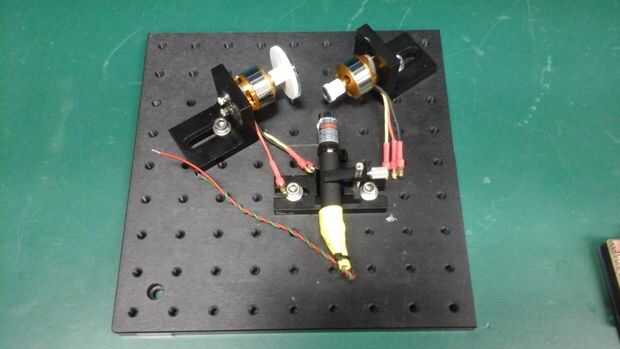



Ahora que tenemos nuestro plan de juego, hemos conseguido la más barato del motor sin cepillo y regulador que nos podríamos encontrar (1200 KV, salida de 20A). Para acelerar la construcción por lo que podemos cumplir el plazo, utilizamos piezas de optomecánico de un laboratorio de óptica para completar la construcción. Utilizamos un n 9i x9 en protoboard óptico para la base, aunque cualquier base haría el trabajo igual. Que los titulares entonces 3D impreso espejo que están inclinados 5 grados desde el eje de rotación y pegan espejos usando pegamento.
Un problema que enfrentamos fue cómo suministrar continuamente el puntero láser verde con energía. Que para conservar la carcasa para fines de montaje. Para esto hemos decidido los cilindros de cobre de hacer usando un torno que es similar en dimensiones con una batería AAA. Nos taladre un pequeño orificio en el extremo del cilindro para el cable. El cable se pasa aunque un agujero pequeño perforado a la cubierta trasera, lo que nos permite el puntero láser de energía continuamente.
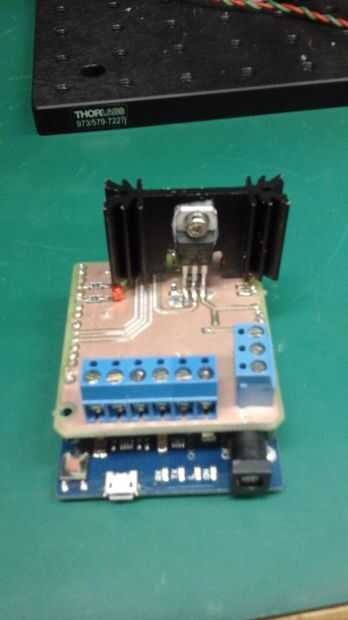
También hemos fabricado simples escudos Arduino (eagle cad archivo y bosquejo adjuntadas) que actuar la interfaz de la señal audio de entrada y salida de servo control. Se incluyeron también un regulador de voltaje LM317 que proporcionará el necesario 1, 5V de una fuente de alimentación de 12V para encender el puntero láser. Inicial se eligió un paquete pequeño para montaje en superficie para el LM317, pero es recalentarse fácilmente y entran apagado térmico. Así se vieron obligados a botch en un gran paquete que puede conectarse el disipador de calor.
Entonces nos láser corte 3 mm espesor acrílico claro para hacer una tapa que es 9 en x 9 en x 2,5. Finalmente hemos forrado el interior con espuma para intentar cortar un poco el sonido de alta frecuencia de los motores.

")











