Paso 5: Configurar el equipo
Como era de esperar hay una gran cantidad de programación necesaria para conseguir este trabajo.
Necesitarás instalar el siguiente software:
- Python 2.7 - recomiendo usar el entorno de desarrollo de Spyder de la distribución de Python(x,y).
- Paquete de PySerial
- OpenCV2
Revisa mi guía para la instalación de Python y OpenCV para más detalles.
Ahora descargar el código desde el repositorio de pc-robot . Actualmente es sólo disposición a trabajar en Windows ahora, pero usted debe ser capaz de trabajar en Linux o MacOS con algunos cambios menores.
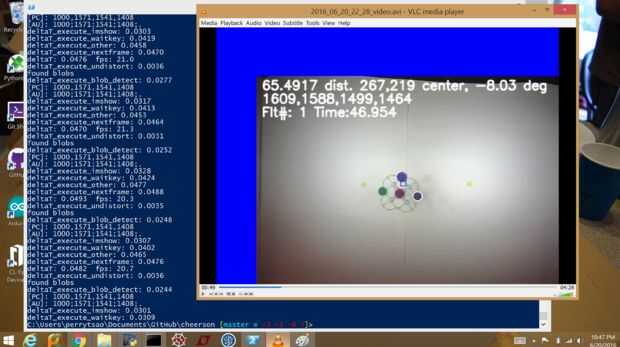
El programa principal para ejecutar es fly_drone.py, ejecutarlo desde la línea de comandos con python./fly_drone.py
Usted tiene que tener la cámara USB y Arduino conectado para ejecutar este código, tal como se especifica arriba. Más probable es que no va a funcionar la primera vez - usted tendrá que editar el código que ve la cámara derecha y también se comunica con el puerto COM correcto para tu Arduino. También, puede que necesite modificar el código para los colores del círculo específico y también las condiciones de iluminación. Este post describe el proceso de cómo el ordenador reconoce los círculos y cómo modificar los umbrales de reconocimiento de color.




")








