Paso 5: Detalles de la construcción
La célula solar es un RU6730 que tiene un nominal de 6.7V y 35mA. Estas salidas están a pleno sol - salida es menos claro en las condiciones de iluminación normalmente se encuentran en el interior. Ahora el motor solar cuenta con la que Walker se enciende cuando la tensión en su condensador de almacenamiento alcanza aproximadamente 3.5V. La unidad de la célula solar suministra fácilmente este voltaje durante todo el día de la luz incidente que penetra a través de nuestras ventanas. Incluso en días muy nublados, Walker va para sus paseos - solo le toma más tiempo para recargar entre paseos cuando está nublado. Si le pasa a parar en un área algo muy sombreada, activo de voluntad generalmente todavía ser (de hecho el motor Solar de CSS555 es particularmente hábil para lidiar con situaciones de poca luz). Durante su embarcado, Walker se ralentiza poco a poco la tensión en su condensador corre hacia abajo. Se apaga en unos 1.9V a Walker un alto agudo.
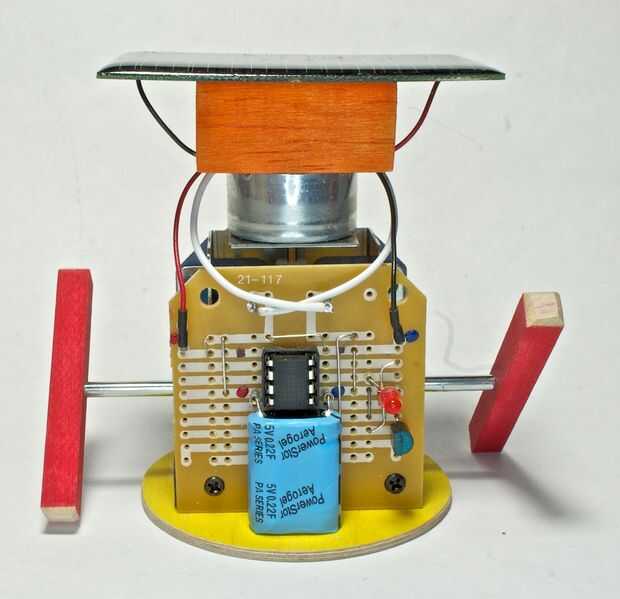
Armas de los caminantes son longitudes de 1/4" madera cuadrado perforado para ser un empuje apretado en el eje del engranaje. Los brazos son unos 3" aparte. El método de "cortar y tratar de" determina la mejor longitud de los brazos. Que más sobresale aproximadamente 3/8" por debajo de la base. El otro brazo se corta más corto para dar el tamaño del círculo en que Walker se desea paseo - que en nuestro caso es de 15". Marchas de nuestro caminante sobre un piso duro, pero también trabaja en la alfombra si lo dejamos. Si tuviéramos más gruesa alfombra suave, sus brazos probablemente tendría que ser más largo. Los brazos se fijan a unos 90 grados entre sí para un paso waddling, pero ajuste en línea da un divertido andar cojeando.
El condensador que se muestra en las fotografías que aquí y en el video es 0.22F que permite casi un círculo completo de recorrido en cada contoneo. Él va alrededor varias veces cuando está equipado con una tapa 1F, pero por supuesto toma proporcionalmente más tiempo en cargar entre excursiones.
")




")

")



")
