Paso 1: Familiarizarse con los comandos EggBot

(Este paso es sobre todo educacional, pero podría proporcionar algo de diversión extra y tal vez alguna visión de cómo funciona lo EggBot).
Como se mencionó antes, lo EggBot se controla con los comandos enviados a él a través de USB. Aquí intentaremos enviar los comandos a mano .
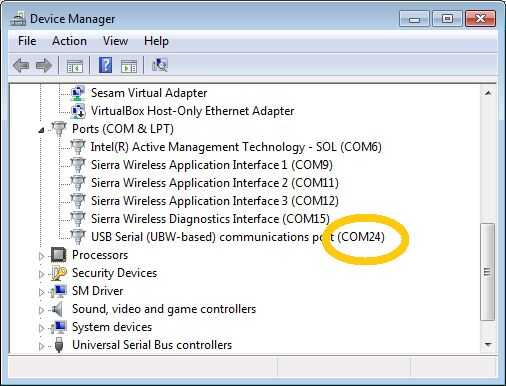
El controlador USB que viene con lo EggBot hace disponible a través de puertos COM serie. Para encontrar el correspondiente puerto COM en Windows, presione "-R" y tipo "devmgmt.msc" (sin las comillas). Ahora debería ver la ventana de "Administrador de dispositivos". Abra el árbol secundario de "Puertos (COM & LPT)" y tratar de encontrar una entrada que comienza con "Puerto de comunicaciones serie (basada en UBW) USB (COM...)". Anote el número del puerto COM, por ejemplo "COM24".
Para hablar a lo EggBot manualmente también tenemos que descargar una herramienta de comunicación serial . Hay varios tales herramientas. Aquí usaremos masilla que está disponible de forma gratuita desde: http://www.chiark.greenend.org.uk/~sgtatham/putty/download.html
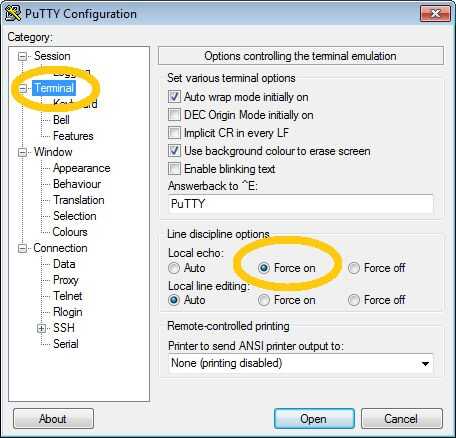
PuTTY.exe iniciar y configurar como sigue: seleccione el nodo "Terminal" y establecer "Eco Local" a "Fuerza a". A continuación seleccione el nodo de "Sesión" y establecer el "tipo de conexión" a "Serial". Por encima de los botones de opción aparece un cuadro de texto nuevo. Escriba el puerto COM exacto que escribió antes (*). A continuación, Asegúrese de que los EggBot es alimentado y conectado vía USB y golpear «Abierto» en masilla. Ahora debería ver una ventana de comandos.
Para comprobar la conexión, tipo "TP" (que significa "pluma de palanca") en la ventana de comandos y la golpeó . El comando es inmediatamente enviado a lo EggBot y confirmado con "OK". Entonces usted puede intentar "SM, 1000, 50, 0" para mover el motor de X y «SM, 1000, 0, 50" para mover el motor Y. Otro comando útil es "EM, 0, 0" (desactivar motores). Hay muchos más comandos y parámetros, pero ten en cuenta que algunos de los comandos pueden mover motores fuertes de maneras inesperadas que pueden romper o dañar el brazo de la pluma o uno de sus dedos. De todos modos, el formato de los comandos EggBot es llamado "EBBCommands" ("EiBot tablero de comandos") y documentado aquí: http://www.schmalzhaus.com/EBB/EBBCommands.html
*) Nota que la velocidad de la conexión serie no importa en este caso, como la conexión de serie COM a lo EggBot simplemente es emulada por el controlador USB (ver también http://www.schmalzhaus.com/UBW/Doc/FAQ.html ).













