Paso 6: Control de la plataforma de Robot - /Reverse hacia adelante y girar a la
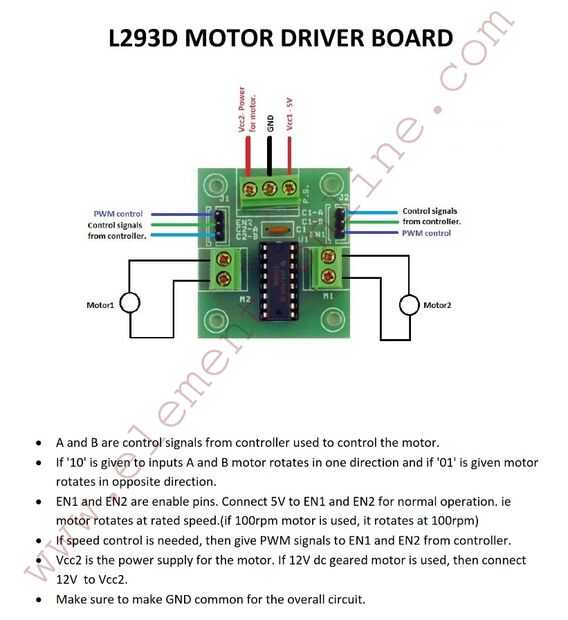
Aquí vemos cómo controlar los 4 motores de DC, para esto que ahora tenemos que montar dos enmiendas placas D L293
Tableros de L293 D uno pueden controlar dos motores DC, se pueden montar placas de L293 D cualquier parte, que he montado en la capa inferior de chasis Dagu mantenerlo firmemente fijada, use cinta de espuma (tan necesario para los tornillos se evitan).
Para conectar las tablas L293 D motor como pi, harían falta alambres de puente. Ahora Conecte el motor al l293 como se muestra en imagen. Pin PWM conectar 5V de la pi (podremos usar PWM para variar la velocidad del motor, pero ahora mantendría alto)
Conecte el L293 4 baterías de enmiendas (he usado GP2100) como ahown.
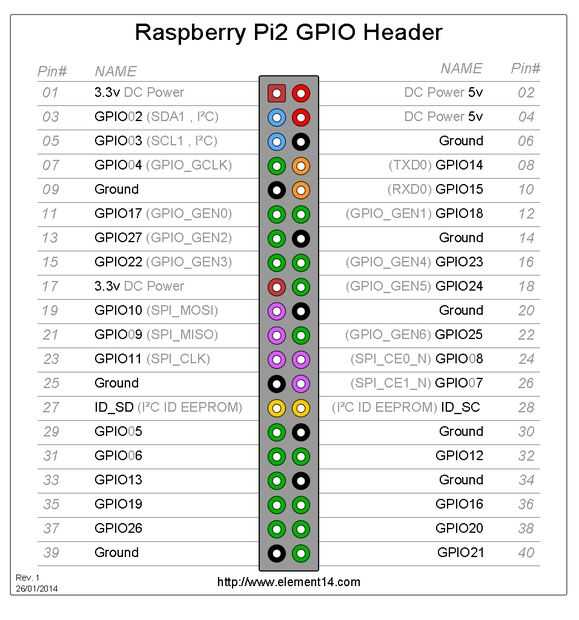
Para alimentación de 5volts a L293, el mismo puede ser tomado de frambuesa salida GPIO (imagen GPIO adjuntada)
Ahora conectar 40 pin GPIO cinta cable pi y un conveniente T-Zapatero o derecho para leer la salida de pi, alambre el alambre puente al L293 tablero como se muestra en imagen. Para controlar la dirección del motor ahora sólo tenemos que configurar la salida GPIO baja o alta para los pernos "A & B"
A lo recto, que he escrito un sencillo programa de python como abajo (Por supuesto puede hacer su python de código y ejecutarlo en pi)
 (utilizando un Arduino y un Netbook)")





")






