Paso 7: Control de los Servos
Servos son importantes en el desarrollo de la robótica, aquí ves cómo controlar servos de 0 - 180 grados en 3 pasos (es decir 0, 90 y 180 grados)
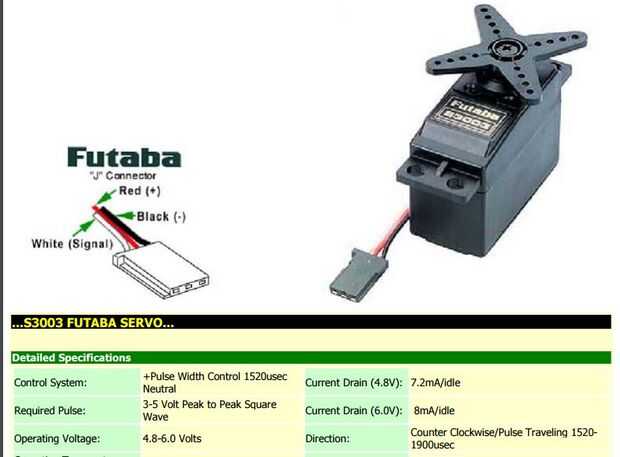
Aquí he utilizado Futuba s3003 servo - la conexión es muy simple el "+" & "-" va a la nuestra batería (en mi caso igual mi 4wd, es decir, conjunto de células AA 4).
Es importante mirar el voltaje de funcionamiento del servo (en mi caso su V 4.8-6 ver imagen de arriba), el cable de señal debe ser conectado a la salida GPIO (véase el perno no en programa python)
Bien Controlando servos en frambuesa pi puede ser complicado pero es muy potente biblioteca acogió a RPIO. PWM, para instalar en pi uso el siguiente código
y aquí está el python de código para convertir los servos (para saber más sobre RPIO. PWM y el DMA que utiliza, consulte el enlace: https://pythonhosted.org/RPIO/pwm_py.html )
 (utilizando un Arduino y un Netbook)")





")






