Paso 8: Saltamontes Script

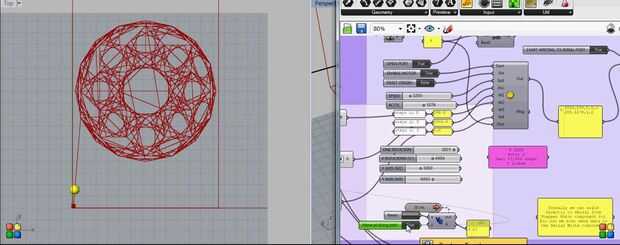
Configurar el archivo saltamontes requiere 9 pasos (uno mucho más largo que los demás... sugerencia: #2)
Antes de empezar cualquier cosa, asegúrese de que sus unidades de Rhino corresponden a las unidades le gustaría imprimir en, o comunicar a los saltamontes con... usamos milímetros.
1. la primera tarea es establecer el volumen de construcción permitida para su impresora 3D. Ya que esto varía según el modelo, usted querrá actualizar las unidades y dimensiones XYZ por consiguiente. Habilitar el componente de construcción de estructura metálica de volumen identificar los grados de construcción.
(Utilizados en esta etapa los componentes: paneles, punto de construir, pt 2, Brep Wireframe, patrón, curva de la caja)
2. establecer la trayectoria de herramienta como una sola curva. A menudo, la trayectoria de herramienta se puede generar fácilmente en saltamontes, como una espiral continua, escalonamiento contorno u otros métodos derivados de forma paramétrica.
* Nuestra trayectoria fue muy específico para el encofrado y salida deseada - con una base de "web" que "tejió" entre y dentro de. Consistió en lo siguiente:
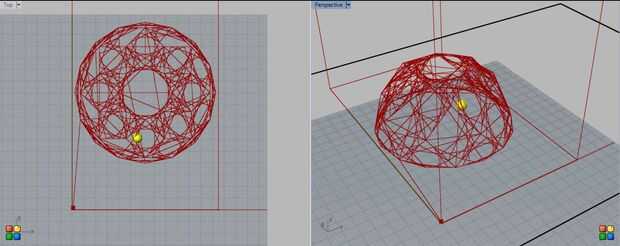
-crear una Facetada, cúpula geodésica, utilizando mallas y subdivisión
-aislar cada faceta
-aplicar la misma armadura de componente (y su patrón) a cada faceta individual
-unirse a cada armadura + la faceta del esquema en una gran curva (trayectoria)
-la trayectoria de herramienta está ligada entonces a los tres motores, moviendo nuestra cama en X y Y y la Z (el estirador) resultando en una extrusión que se trasladó directamente a lo largo de las líneas de borde y faceta de las cúpulas
-hemos creado cuatro diferentes bóvedas de diferente cantidad de facetas, cuatro densidades diferentes del componente de tejido que se aplica a respondió a cada forma de la bóveda y a tres diferentes escalas de las formas de la cúpula, dando como resultado 48 opciones de script diferentes para imprimir desde.
3. usted querrá confirmar que la trayectoria completa dentro del volumen permitido construir (con la parte inferior en el plano XY) antes de activar los motores paso a paso evitar la transición a cualquiera de los ejes y dañar los motores. Esta porción verifica que todos los vértices dentro del volumen de construcción permitida.
(Los componentes utilizados en este paso: puntos de Control, interior, longitud de la lista, además de masa, igualdad, paneles)
4. este paso activa el movimiento de la impresora. Utilizar un cronómetro para evaluar continuamente la curva de alimentación incremental pasos a los motores paso a paso. Velocidades de reloj más rápidas tendrá como resultado un movimiento más rápido del motor.
(Los componentes utilizados en este paso: VB Script, temporizador, Boolean alterna, Panel)
5. para el temporizador evaluar la curva, se debe asociar una distancia con la cantidad de tiempo transcurrido. El aumento del valor se utiliza como un porcentaje para evaluar la longitud total de la trayectoria de la curva completa o alimenta en el patio de paso a paso. En nuestro caso, 1mm/50ms resultó para ser la velocidad ideal para nuestra extrusión de pegamento caliente. El más lento la velocidad, más precisa puede esperar las complejidades de su trayectoria al ser. Sin embargo, la experimentación con la velocidad de extrusión y encontrar un equilibrio entre los dos será necesaria encontrar la velocidad ideal para cada máquina única y configuración del material.
(Los componentes utilizados en este paso: longitud, paneles, división, multiplicación, mínimo, longitud de evaluar)
6. para visualizar el punto actual a lo largo de la trayectoria de herramienta de impresión, crear una pequeña esfera en el punto evaluado en pasos anteriores y activar la "vista previa". Esto simula el movimiento de los tres ejes en tiempo real.
(Los componentes utilizados en este paso: esfera, Swatch, costumbre escuchar)
7. el componente de evaluar longitud de antes le da una ubicación de coordenadas cartesianas. Estos valores necesitan convertir en pasos para traducir a cada uno de los motores paso a paso respectivo - pero antes de que puede suceder hay que convertir la distancia lineal a la distancia angular (los motores proporcionan el movimiento de rotación). Para lograr esto, necesitamos un valor de conversión para determinar cuántos grados son iguales a una distancia especificada. En nuestras pruebas, hemos impreso un cuadrado de 50mmX50mm y tenía los motores paso a paso trazar la forma continuamente hasta que los valores de calibración XY permitieron la cabeza de extrusión crear el impreso cuadrado tan exactamente como sea posible. Del mismo modo, nos mueve la extrusora verticalmente una distancia cuantificada y medir cuántos pasos tomó para llegar a esa distancia, o viceversa.
(Los componentes utilizados en este paso: deconstruir, paneles, multiplicación, entero)
8. una vez que la ubicación en el espacio cartesiano se ha convertido de valores lineales a valores angulares, podemos utilizar al convertir en componentes de paso para convertir los grados a los pasos. Motores paso a paso se clasifican por su pasos/revolución y la cantidad de micropasos por paso. Asegúrese de verificar estos valores para que la distancia resultante es fiel a los motores paso a paso con que se trabaja. Con este componente: la "S" es los pasos por la revolución para cada motor, donde la "M" es el número de micropasos. Para nosotros esos valores fueron 200 y 8, respectivamente. Usted puede encontrar que algunos de sus motores de viajan hacia atrás (esto es común) y corregir (o lo alimentan los números negativos correctos a ser calibrado con los otros motores)... simplemente multiplicar la salida específica de este paso, por -1, y entonces se alimente en el componente cuatro paso a paso con los valores correctos. Esta misma idea de multiplicación puede usarse para escalar uniformemente hacia arriba o hacia abajo de la geometría a un diverso tamaño deseado)
(Los componentes utilizados en este paso: convertir de grados a los pasos (para cada motor/eje), negativo, multiplicar)
9. por último, saltamontes necesita establecer una conexión con y escribir en la placa Arduino. Comience abriendo el puerto correspondiente. Luego activas el motor, que enviar los valores a la tabla y comenzar el movimiento del motor. Hay un rearme incorporado en el motor. Tenga en cuenta que cuando reinicia, está definiendo su ubicación actual en el espacio cartesiano como 0,0,0, de tal modo anular sus reales coordenadas cartesianas. Las coordenadas cartesianas que se describe en el paso 5 son medidas relativas a la última reposición ubicación.
(Los componentes utilizados en este paso: serie de cuatro pasos, puerto disponible, escribir, paneles)




")








