Paso 6: Casi allí.
-Utilice un destornillador y añade holgura a los cables positivo y negativo de la batería como se muestra en la primera foto (hace más fácil para que Deslice hacia el lado cuando tenga que cambiar la batería).
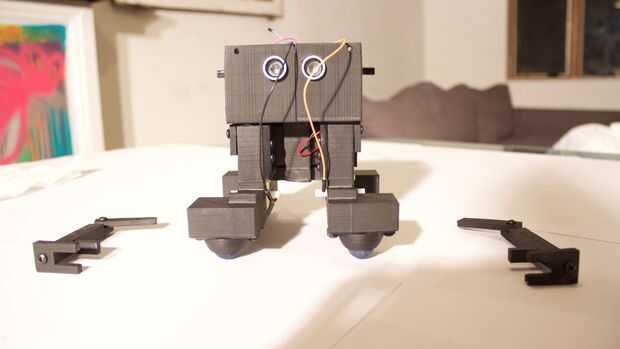
-Fije las garras a los brazos y a los pedazos del hombro como se muestra en la primera foto.
-Coloque los brazos a las piezas de imitación servo, como en la segunda foto.
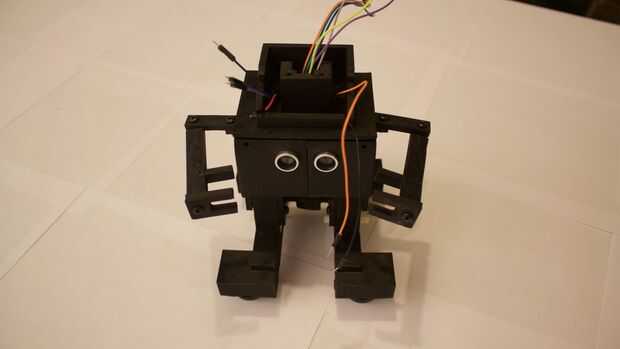
-Encontrar la pieza del cuello en el tercer cuadro y colocar la pieza en forma de C (neckNoServo.stl de nombre de archivo) con dos tornillos de la parte inferior. Tirar todos los cables a través de esa Asamblea.
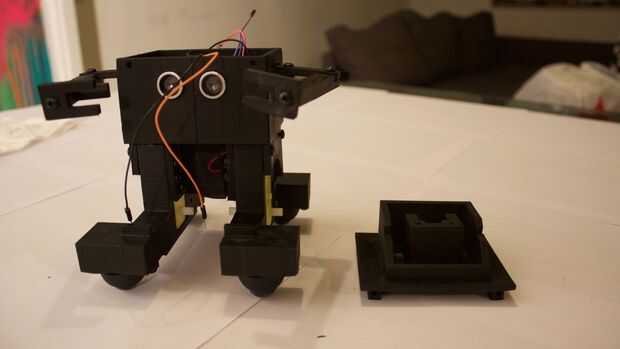
-Fije el conjunto de cuello con 4 tornillos a la base que tienes hasta ahora.
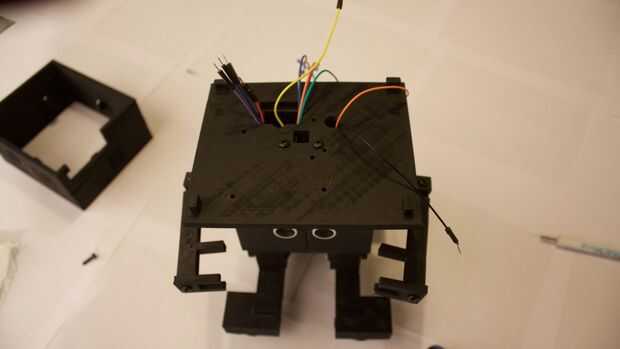
-Añadir la cabeza abajo y tirar los cables por que intentan usar la orientación de los cables en el cuadro 4 y 5. Sensor de gama los cables a través de la izquierda agujero más (a la derecha del robot), conductor del motor de los cables a través del centro y poder y tierra a través del agujero más.
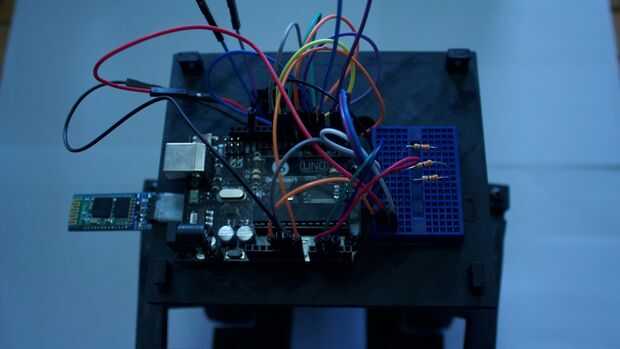
-Adjuntar 4 macho a hembra conectores al módulo de bluetooth y con cinta adhesiva si es posible. Va a ir por debajo de la placa de Arduino como en la última foto. Se trata de abajo por lo que puede ser desconectado fácilmente al cargar nuevos bocetos.
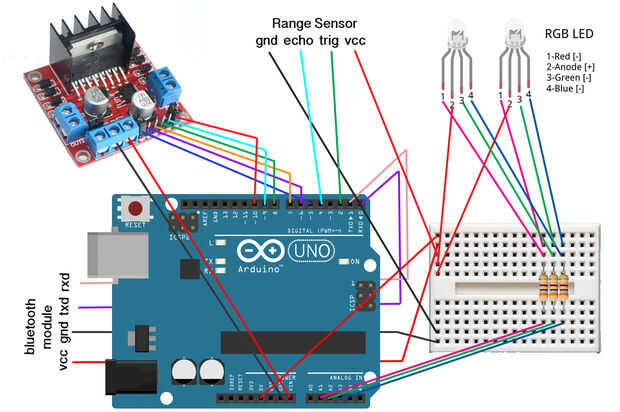
-Alambre todo según el esquema (segunda a la última foto).
 para Arduino y frambuesa Pi - CustoBlocks")






")





