Paso 1: Poner las cosas juntas
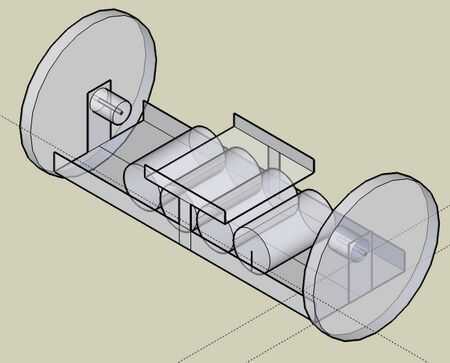

La longitud de la percha es realmente hasta su elección, pero la anchura es diseño para caber una D tamaño de soporte de la batería con facilidad. La colocación exacta de las baterías son fundamentales ya que duplica como el contrapeso para el robot.
Las pilas se colocarán centro muerto, lo largo y ancho. Si no el robot será o no capaz de balancear hacia arriba, o no será capaz de moverse hacia adelante y hacia atrás (porque una rueda lleva más carga que la otra).
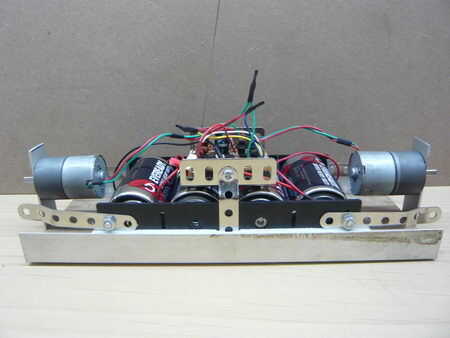
Orientado motores utilizados son clasificados en 12V, 100mA, 130 RPM y torque de 58.8mN.m. El motor se conducen en mitad de la energía (alrededor de 5.5V y 50mA). Voy a explicar por qué más adelante.
Orientado de motores se utilizan en vez del un normal motores de corriente continua. Son los más adecuados para este proyecto debido a que produce a bajas RPM y tiene suficiente par para el robot. Más adelante encontrará que el robot podría llegar a ser bastante pesado.
Los motores están montados directamente en la cuna, nota que hay habitación debajo del motor, este es el espacio donde Agregaremos más contrapeso si es necesario.
El circuito que impulsa los motores se monta encima de las baterías. Inicialmente planeado hacer mis propios circuitos antes de pereza huelgas y terminan hackeando un coche de RC del circuito :)













