Paso 7: electrónica
La electrónica es bastante sencilla.
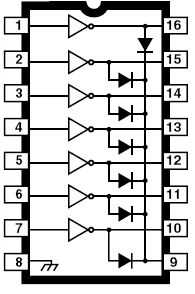
Colocar las dos ULN2003A controladores de motor en un protoboard.
La salida digital puede provenir de cualquiera de los pines PWM de Arduino. Estos se pueden especificar en el software en el siguiente paso.
Cada motor requiere 4 pernos en el arduino (llamada de los pernos A, D, dependiendo de la PWM pins te eligieron), uno para cada bobina de motor de paso a paso/fase.
Instale pernos A-D de arduino a los pines 1-4 en el ULN2003.
Pin 8 de la del conductor de tierra y conecte 2.5V (alta corriente) al pin 9.
Conectar los cables de colores paso a paso para el chip de controlador en el siguiente orden:
Pin 16: naranja
PIN 15: negro
PIN 14: rojo
PIN 13: amarillo
PIN 9: blanco
Se adjuntan la hoja de datos del Motor de pasos y pinout ULN2003.
Para generar el vídeo, los motores fueron atados a Arduino usando el fácil paso a paso Motor controlador. A continuación se proporciona el código utilizado para mover el cabezal de escritura y hacia atrás:
int stepPin = 2; void setup() {} pinMode (2, salida); digitalWrite (stepPin, alto); void loop() {} digitalWrite (dirPin, HIGH);
int dirPin = 3;
int LEDpin = 13;
ii int = 0;
pinMode (3, salida);
pinMode(13,OUTPUT);
digitalWrite (dirPin, HIGH);
}
para (ii = 0; ii < 2000; ii ++) {}
Delay(5);
digitalWrite (LEDpin, LOW);
digitalWrite (stepPin, baja);
Delay(5);
digitalWrite (LEDpin, alto);
digitalWrite (stepPin, alto);
}
digitalWrite (dirPin, bajo);
para (ii = 0; ii < 2000; ii ++) {}
Delay(5);
digitalWrite (LEDpin, LOW);
digitalWrite (stepPin, baja);
Delay(5);
digitalWrite (LEDpin, alto);
digitalWrite (stepPin, alto);
}
}







")
