Paso 2: Paso 2: programación Znap
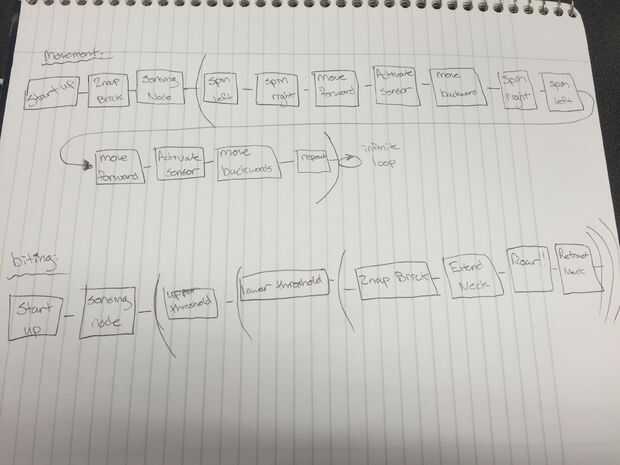
El segundo paso es continuar adelante con el ladrillo de programación para la Znap. Esto permitirá Znap moverse autónomamente tras comenzar el programa. Lo que usted tendrá que hacer primero es abrir un nuevo programa del archivo en la carpeta Znap EV3 (esto es donde usted recibirá las instrucciones para construir el robot). Aunque no es necesaria, puede ayudar a escribir en una hoja de papel lo que quiere el robot para hacer.
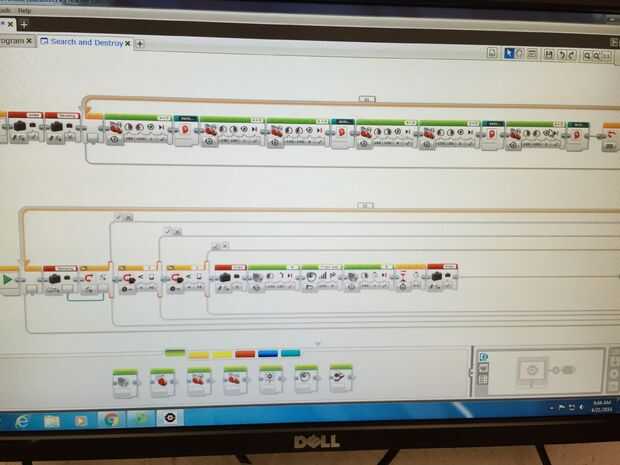
Hemos proporcionado una imagen del programa que utilizamos para hacer el Znap cobran vida. Sería útil guardar las fotos para que usted puede acercarse a los detalles del código. Hay muchas maneras diferentes que usted puede programar Znap para realizar lo que deseas. Los motores principales que permiten la Znap mover hacia adelante y hacia atrás están etiquetados "A" y "D" en el ladrillo. El motor que controla los movimientos del cuello está etiquetado como "B". La razón por qué hay ningún motor "C" es porque el puerto está abierto en el ladrillo. Refiriéndose a la imagen, usted notará que hay dos líneas de programa independiente. La línea superior aborda el movimiento y la línea de fondo se ocupa de la detección. Para la línea superior, te darás cuenta los nodos azules "Activate". Esto es para que el Znap a morder cuando se da cuenta cualquier cosa cerca de su campo de sensor. Asegúrese de para la línea de detección, que se incluyen las tolerancias de los sensores. Esto es para que él no recoge algo que es, por ejemplo, 5 pies de distancia.
Algunos consejos útiles para la programación: Valores negativos para los motores "A" y "D" hará que los motores giran hacia la derecha que le permitirá avanzar. Si no lo haces, encontrarás que los movimientos Znap se moverán hacia atrás. Cuando se está programando la gira, asegúrese de usar el nodo de movimientos y establecer los valores de enfrente uno del otro (-100,100). Esto permitirá que los motores a girar en direcciones opuestas.





")






