Paso 5: sensor de efecto Hall
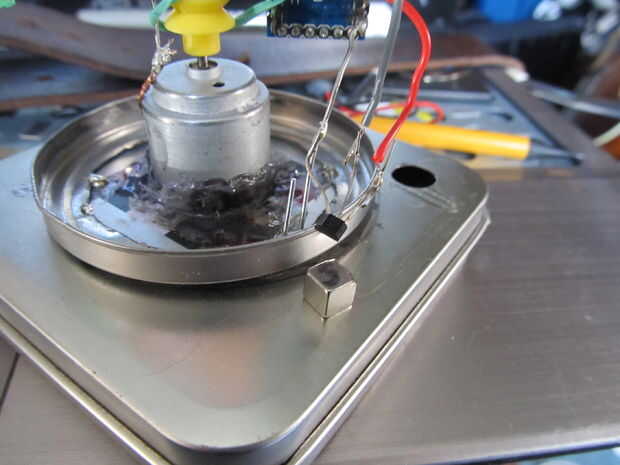
Para detectar la posición del Arduino y sincronizar su salida al girar utiliza un sensor de efecto Hall va del pin A0 en el Arduino. Conectado el pin negativo de sensores directamente al clip que actúa como el cepillo negativo y utilizado un pedazo de alambre para sujetar el pin positivo a VCC. La rigidez de los alambres le permiten ser colocado sobre el imán pero son lo suficientemente rígidos para mantener su forma cuando está girando el dispositivo.
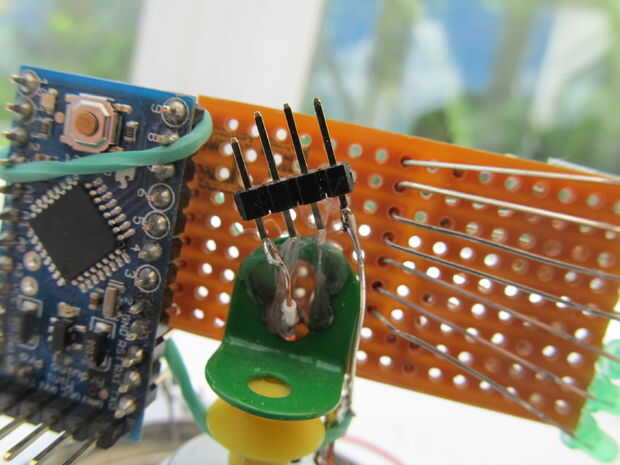
Al programar el Arduino USB power puede bajar las escobillas hacia el motor, esto puede dañar el puerto USB si el motor se acerca demasiado actual así que añadido un interruptor pequeño de unas pinzas de cabecera y un conector de altavoz. Sería mejor usar un interruptor real pero no tengo ninguna lo suficientemente pequeño, un diodo también funcionaría muy bien aunque he probado y debido a la caída de 0,7 voltios fue incapaz de poder Arduino pero si tienes una mejor fuente de alimentación un diodo sería una solución mucho más elegante.









")



